ULTRASONIDO
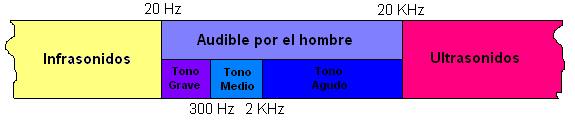
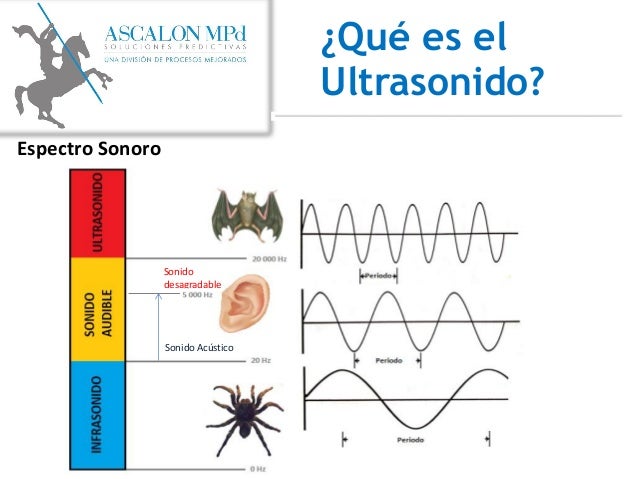
Los ultrasonidos son ondas sonoras con una frecuencia
superior a 20.000 Hz, que no son percibidas por el oído humano; sin embargo,
tienen muchas aplicaciones en campos como la Medicina, La biología, la Física,
la Química o a la industria.
INFRASONIDO
Podemos definir los infrasonidos como las
vibraciones de presión cuya frecuencia es inferior a la que el oído humano
puede percibir; es decir entre 0 y 20 Hz. Pero, debido a que la mayoría de los
aparatos electroacústicas utilizan una frecuencia entre 20 y 30 Hz,
consideraremos también como infrasonidos a toda vibración con una frecuencia
por debajo de los 30 Hz.
El infrasonido es una ventaja de la cual disfrutan varios
animales, especialmente los más grandes, tal es el caso de los elefantes, que
lo emplean para comunicarse a través de importantes distancias. La capacidad de
poder oír a enormes distancias es plausible gracias al importante tamaño de sus
cabezas y la separación que presentan sus oídos, siendo ésta, directamente
proporcional a la frecuencia que son capaces de captar. Cabe destacar, que los
elefantes, incluso, logran captar el infrasonido al percibir las vibraciones
que producen ellos mismos con los movimientos de sus patas, porque sus uñas
hacen las veces de sensores conductores de los sonidos que presentan baja
frecuencia.
SONIDO
Cuando hablamos de sonido, nos referimos a la
propagación de las ondas mecánicas originadas por la vibración de un
cuerpo a través de un fluido o un medio elástico. Dichas ondas pueden o no ser
percibidas por los seres vivos, de acuerdo a las características de
las ondas transmitidas,
y a la afectación que sobre ellas ejerce el medio por el cual se transmiten.
Existen sonidos audibles por el oído humano y
otros que sólo perciben ciertas especies de animales. En cualquier caso, se
componen de ondas acústicas debidas a la oscilación de la presión del aire, que
son percibidas por el oído y transmitidas al cerebro para ser interpretadas. En
el caso del ser humano, este proceso es esencial para
la comunicación hablada.
El sonido puede propagarse también en otros
elementos y sustancias, líquidos, sólidos o gaseosos,
pero a menudo sufriendo ciertas modificaciones. En cualquier caso, se trata
de un transporte de energía sin transporte de materia, y al contrario de
las ondas electromagnéticas de la luz o la radiación, no puede propagarse en el
vacío.
.
https://encrypted-tbn0.gstatic.com/images?q=tbn:ANd9GcQOrKOQDzWGBDBlnd1NzYjcxCGDzX8O_DEnIEaGH0xVfzsNKsJD5g
https://image.slidesharecdn.com/presentacionascalonmpd-130710173140-phpapp01/95/presentacion-de-servicios-ascalon-mpd-soluciones-predictivas-termografia-y-ultrasonido-6-638.jpg?cb=1373477611
FUENTES